考虑到行驶路面的特点、驾驶情况以及驾驶员的需求,对每个车轮都进行了减震设定。

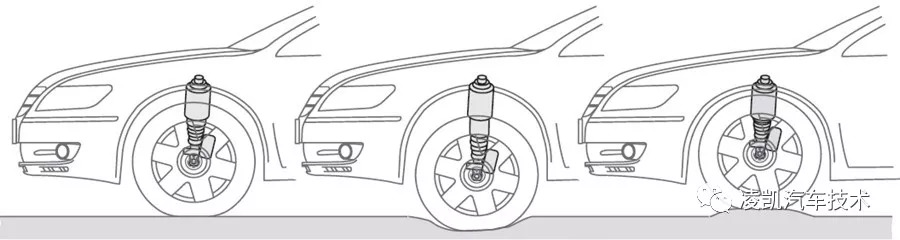
当车辆运动时,外部作用力与冲击会使车辆沿三维空间轴的方向(横轴、纵轴和垂直轴)产生运动与振动。
减振的目标是,在悬架系统与减振系统之间获得良好的平衡,从而将这些力 对驾驶舒适性、驾驶安全性和操纵安全性的影响降到最低。
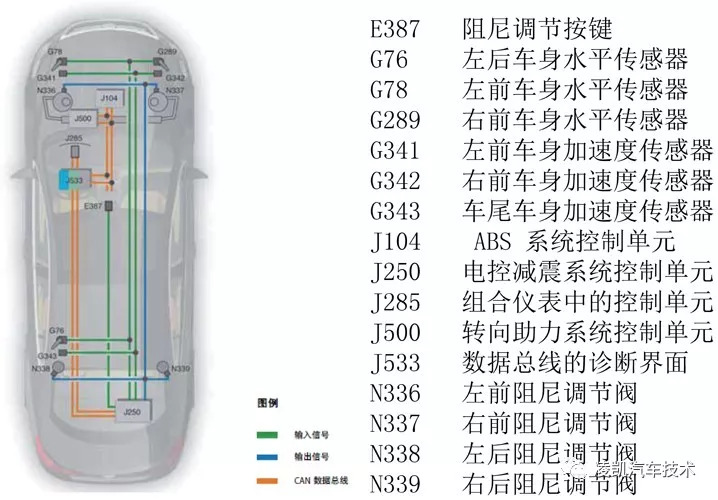
1. 控制单元

2. 车身水平传感器
(1)左后车身水平传感器

(2)左前车身水平传感器

(3)右前车身水平传感器

(4)车身水平传感器原理图
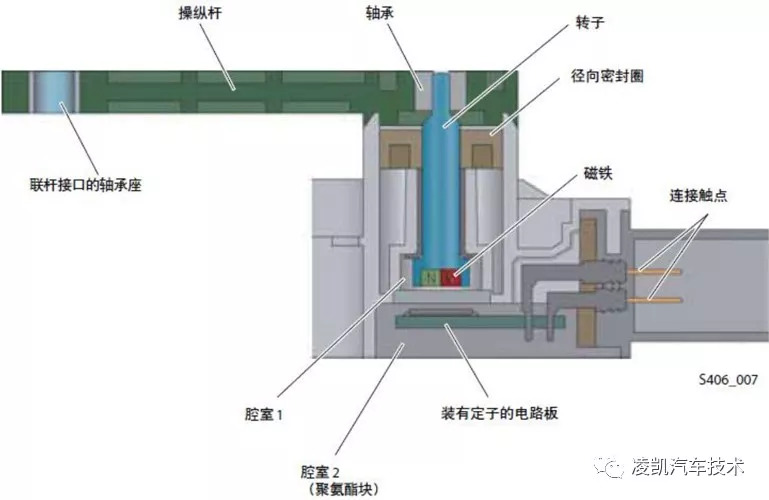
车身水平传感器就是通常所说的转角传感器。这些传感器安装在减震器附近,并通过联杆与横向导臂活动地连接。
轮胎的弹性行程通过前、后桥横向导臂和联杆的运动传递到传感器上,并换算成旋转角度。
所使用的转角传感器运转时产生静态磁场,并且遵循霍尔原理。
信号输出口为减震器调节提供了一个与旋转角度成比例的PWM信号(脉宽调制信号)。
三个水平传感器的构造一样,只是支架、联杆和运动特性在各个侧面和车桥上有所不同。
3. 车身加速度传感器
(1)左前车身加速度传感器

(2)右前车身加速度传感器

(3)左后车身加速度传感器

(4)车身加速度传感器原理
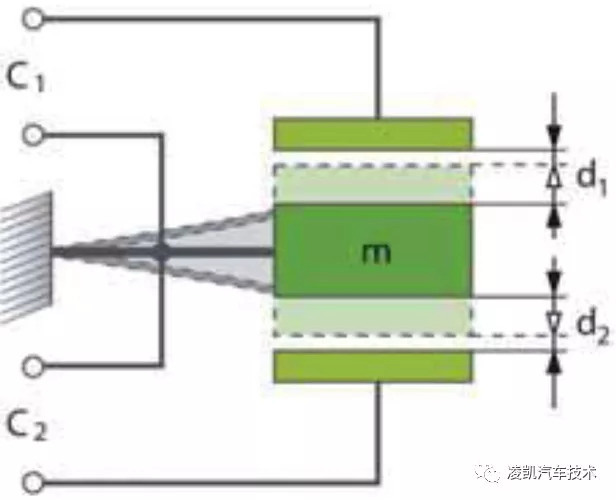
车身加速度传感器根据电容测量原理工作。
在电容极板之间有一个弹性支承块 m 作为中间极产生振动,从而反向协调电容器 C1 和 C2 在其振动周期内的电容。一个电容器的极板间距d1增大一个数值,另一个电容器的极板间距d2就会减少同样的数值。这样,就改变了各个电容器的电容。

相关书籍:
《图解汽车构造与原理新技术/新结构/新能源》
化学工业出版社
作者:于海东